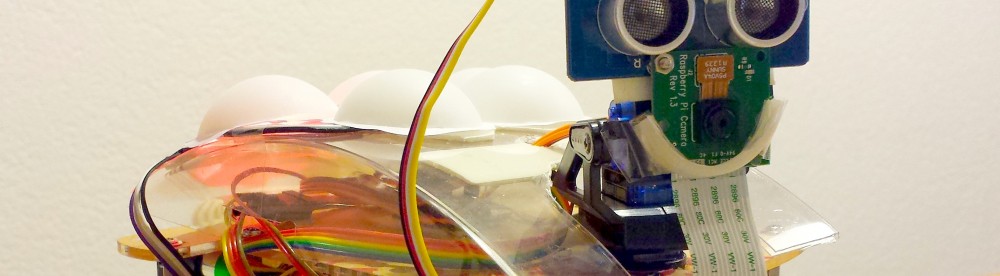
Finally, I took some time to connect the camera! This required almost complete deconstruction, since the Raspberry Pi had to be dislodged in order to access the CSI to insert the new, longer, camera ribbon. Also, the camera unit needed to be turned 90 degrees to let the cable stick out the side of the robot’s head, so the head was disassembled as well. Anyway, here’s to the first time that FRAC is looking at itself! I have a feeling this might come in handy somehow….