After burning many flasks of midnight oil, I’m proud to introduce to you…
The first FRAC prototype!
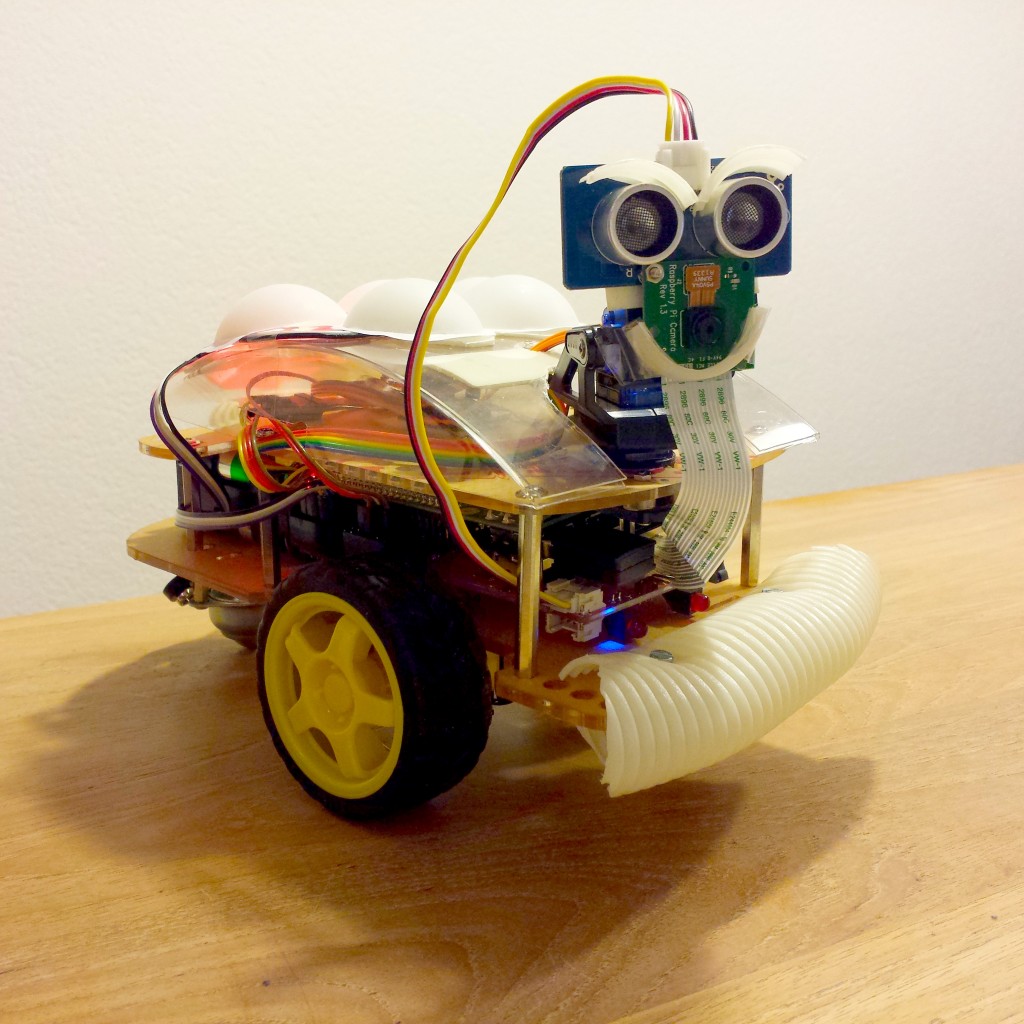
FRAC weighs in at 787 grams, measures 23 cm from front bumper to caster wheel, and stands 16 cm tall. Both maker and robot are doing well.
It may not look like much and it may not be able to do much (yet), but to me it represents a sheer endless source of creativity and learning. As per the plan, my GoPiGo base kit has been customized with two homecooked expansion modules: the “head” and the “backpack”.
The head
 The head module contains the ultrasonic distance sensor and the camera unit, and together these make up FRAC’s eyes. The distance sensor will be the primary input for simple processing tasks, such as scanning the area for obstacles while moving around. The camera unit could be used for more complex computer vision tasks, such as object tracking or face recognition, although this topic is still quite far away in my future plans. Initially, it will just be used as a camera, to enable the human operator to see through FRAC’s eyes, and to let FRAC create an online photo album. Maybe.
The head module contains the ultrasonic distance sensor and the camera unit, and together these make up FRAC’s eyes. The distance sensor will be the primary input for simple processing tasks, such as scanning the area for obstacles while moving around. The camera unit could be used for more complex computer vision tasks, such as object tracking or face recognition, although this topic is still quite far away in my future plans. Initially, it will just be used as a camera, to enable the human operator to see through FRAC’s eyes, and to let FRAC create an online photo album. Maybe.
 The two vision sensors are glued to a small plastic pan/tilt system. This is essentially a small turret operated by two servomotors, which function as the robot’s neck. This neck system enables FRAC’s head to turn right & left as well as up & down. Although the servos support full 180° range of motion, their freedom is limited because of the Raspberry Pi camera cable. Unfortunately, this cable is not long / flexible enough to allow for the full range of motion. In order to make it move as much as it does, I already had to install the pan/tilt system below the GoPiGo top plate, instead of on it, to give that cable as much slack as possible. More on this to follow in a future instructional post.
The two vision sensors are glued to a small plastic pan/tilt system. This is essentially a small turret operated by two servomotors, which function as the robot’s neck. This neck system enables FRAC’s head to turn right & left as well as up & down. Although the servos support full 180° range of motion, their freedom is limited because of the Raspberry Pi camera cable. Unfortunately, this cable is not long / flexible enough to allow for the full range of motion. In order to make it move as much as it does, I already had to install the pan/tilt system below the GoPiGo top plate, instead of on it, to give that cable as much slack as possible. More on this to follow in a future instructional post.
The backpack

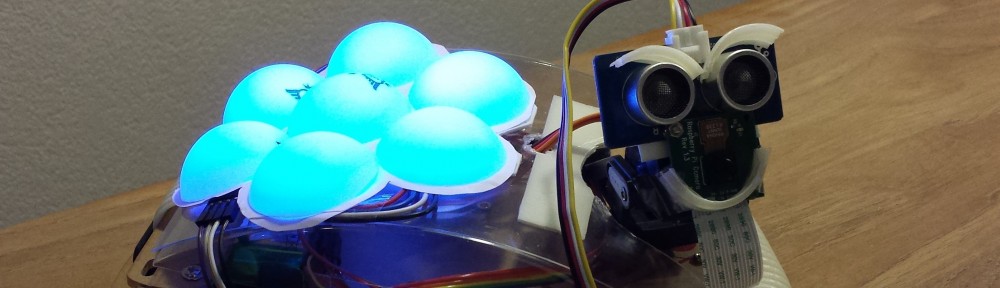
The most eye-catching feature of the custom backpack is the RGB LED array. If you haven’t seen the demo video yet, it’s on YouTube. Each of these 7 LEDs can be individually set to 1 of 16 million possible colors, offering a wealth of output options for creative lighting designers. The lights could be used to:
- Indicate all kinds of statuses
- Show entertaining artsy sequences
- Express moods (for the future animatronics aspect)
- Indicate orientation direction or force (compass / roll / jank)
- Tell the time (not sure how yet, but I’m sure it’s possible with some human interpretation effort)
- Or anything you can think of, your ideas are welcome in the comments section!
The next thing worth mentioning about the backpack is the orientation sensor hiding inside. This nifty little component contains a compass, an accelerometer, a gyroscope and a thermometer. This will provide FRAC with a sense of direction, force, and rotation. Some of the functionality that can be created with this sensor:
- Move in a straight line
- Rotate at exact angles
- Detect blockage
- Detect collision / impact
- Detect being picked up / transported
- Detect elevator movement (and get out at the right floor!)
- Or anything you can think of, your ideas are welcome in the comments section!
However, the best part of this component is the added little bonus that will only make sense to people who have ever worked with traditional orientation sensors: this one contains a dedicated on-board microcontroller to handle the sensor abstraction and fusion. Thus, it provides information that can be directly used in the robot control sequence, instead of a bunch of gibberish raw data that can only be understood by someone with a degree in spatial mathematics.
A note to my fellow roboteers: If you are into hobby robotics and do not know the Adafruit BNO055 board yet, I urge you to check it out. The unit is a bit on the pricey side, but it will save you weeks (or even months) of complex-maths-induced-headache that impede you from actually working on cool robot functions. Totally worth it!
The final component that completes the backpack hardware is a buzzer. What can I say about it, it’s a buzzer.
So, what do you think about my little creation? What cool ideas do you have for FRAC’s future functionality? Let me know in the comments below!
Hey Matt, it really starts to look like an animal 🙂
Some random thoughts for the backpack lights:
battery-indicator, current-speed, mileage, or more animatronic: pain indication when a collision occurs (is collision even possible?)
Could you colorcode the current cameraview onto the backpack?
Or an indication that FRAC is approaching some kind of obstacle? Would be cool if you could get some idea about what FRAC’s thinking about in general while exploring. Keep up the posts! 🙂
Cool, thanks Pete! I really appreciate how you are thinking along with the possible functionality, I’m gonna write some of that stuff down (actually, copy-paste more likely ;-)). You truly are full of ideas, let’s have a chat about this soon!
Some urls you might be interesting in to check out for video streaming and motion detection and other interaction. As soon as you have a network connection and nodejs running on the raspberry than you can start doing remote stuff. Like stream i the video from the camera and adding voice control
http://www.lavrsen.dk/foswiki/bin/view/Motion/WebHome
http://nodebots.io/
http://johnny-five.io/
Thanks Nico! I will definitely check those out, video streaming is one of the things I hope to add in the not-so-far future…
Cheers,
Matthijs